产品与系统
发动机缸盖识别定位引导六轴机器人搬运系统
系统概述
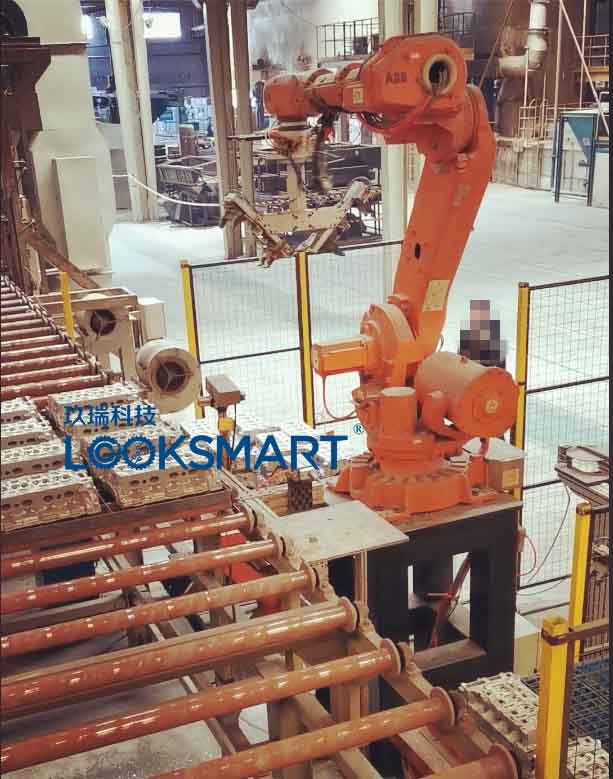
汽车发动机缸盖智能搬运系统,是采用玖瑞科技自研的机器视觉识别定位技术系统进行识别和定位,控制机器人模块协同完成发动机缸盖毛坯料及成品料在进料栈板、线体栈板及出料栈板之间的搬运工作,辅之以上料二维码读取与识别,下料气动打标工序。该系统是机器视觉技术系统的典型应用。
l 该系统可以实现三种功能模式:单上、单下、边上边下模式。

视觉识别与定位
用户现场需要视觉识别定位的两种产品,识别算法通过特征提取,特征比对等工具对产品进行识别以对应不同夹具,两种产品图像如下:

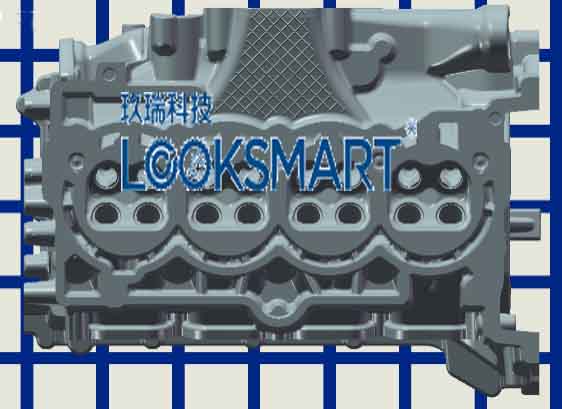
平面定位基本原理:通过视觉系统获取发动机缸盖上端面上的选定特征点相对于标定位置在X向、Y向及旋转角度α的偏移量,可以通过阈值分割或者模板匹配进行偏移量的获取。
l 获取模板图像
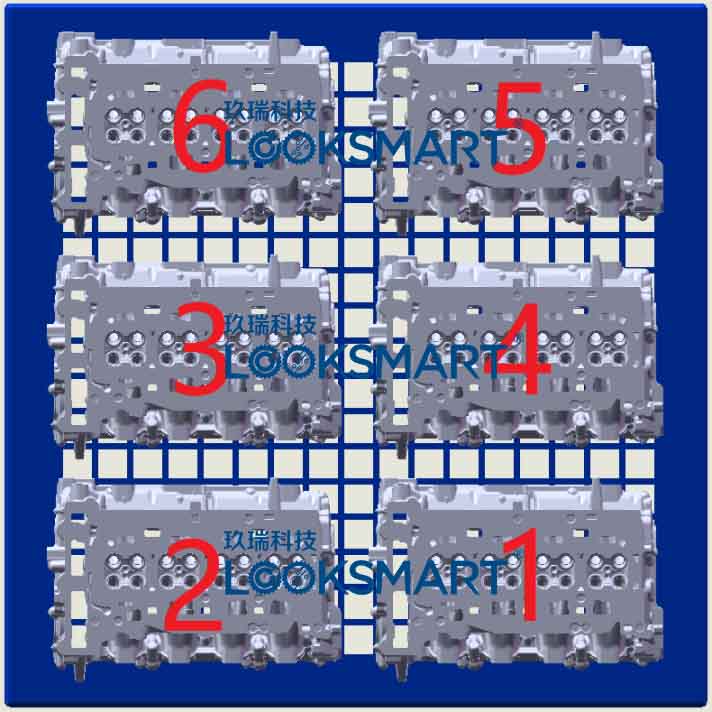
满垛发动机缸盖示意


机器人引导与控制
由于满垛进料栈板上的发动机缸盖在水平面上无法精确定位码放,所以每次上料后栈板上的发动机缸盖位置相对于机器人第一次程序调试时的位置在x向、y向及角度上都存在一定偏差,视觉定位算法为机器人提供了发动机缸盖相对标定位置的偏移量,机器人可以根据此偏移量调整发动机缸盖的抓取坐标。搬运识别定位系统集成了机器人控制、识别定位控制及线体控制三大控制模块通过工业总线进行系统通讯,系统网络布局图详见图所示。
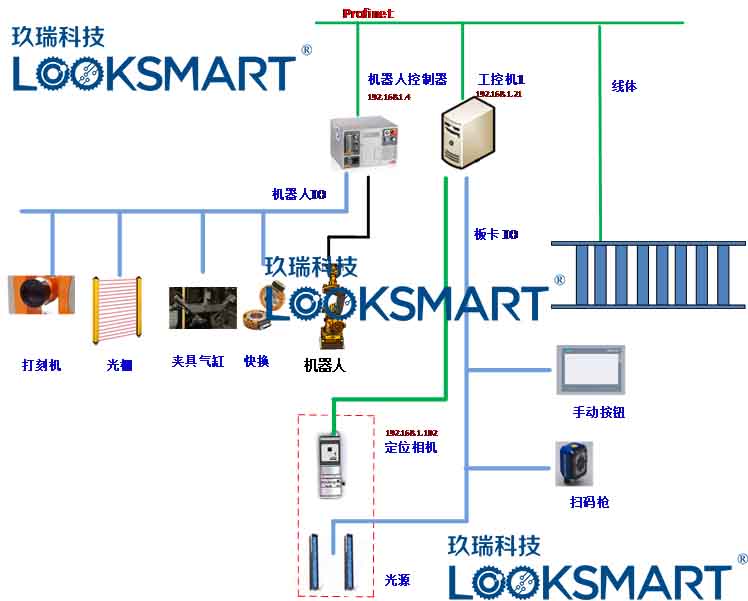
系统网络布局图
